美国海军研究办公室资助900万美元推进量子纠缠传感器网络研发。
Quantum Computing Report网站2026年1月3日报道,美国海军研究办公室宣布向密歇根大学领衔的研究团队授予900万美元MURI资助,用于开展为期五年的分布式量子纠缠传感网络基础研究,旨在突破传统传感器灵敏度极限并服务于海军作战需求。美国国防部下属的海军研究办公室(ONR)向密歇根大学张哲深教授团队授予900万美元的多学科大学研究计划(MURI)资助。该项目代号“DISCO-DEQS”,核心目标是构建分布式纠缠量子传感(Distributed Entangled Quantum Sensing)的完整技术框架。技术路线方面,研究团队将利用量子纠缠现象连接多个传感器节点,通过二次方标度或更高阶的性能提升,使网络测量灵敏度和带宽突破标准量子极限(SQL)。项目将整合量子计算与网络资源,包括纠错与稳定化方法,增强多传感器数据融合能力。密歇根大学的Peter Seiler教授负责引入控制理论与反馈回路,将量子传感器阵列视为动态系统,通过实时分析优化后续测量精度。研究团队涵盖普林斯顿大学、马里兰大学、芝加哥大学、亚利桑那大学及南加州大学的联合主持人,实验测试平台设于密歇根大学和普林斯顿大学。项目预期应用场景包括GPS拒止环境(卫星导航信号被干扰或屏蔽的作战环境)下的惯性传感器、高精度地震监测,以及“量子互联网”架构中的安全通信基础设施。该资助标志着纠缠传感器节点性能优势研究从高风险基础科学向海军实用化的转型。
美国航空航天公司网站发布文章《全球冲突暴露GNSS漏洞,激发创新》。
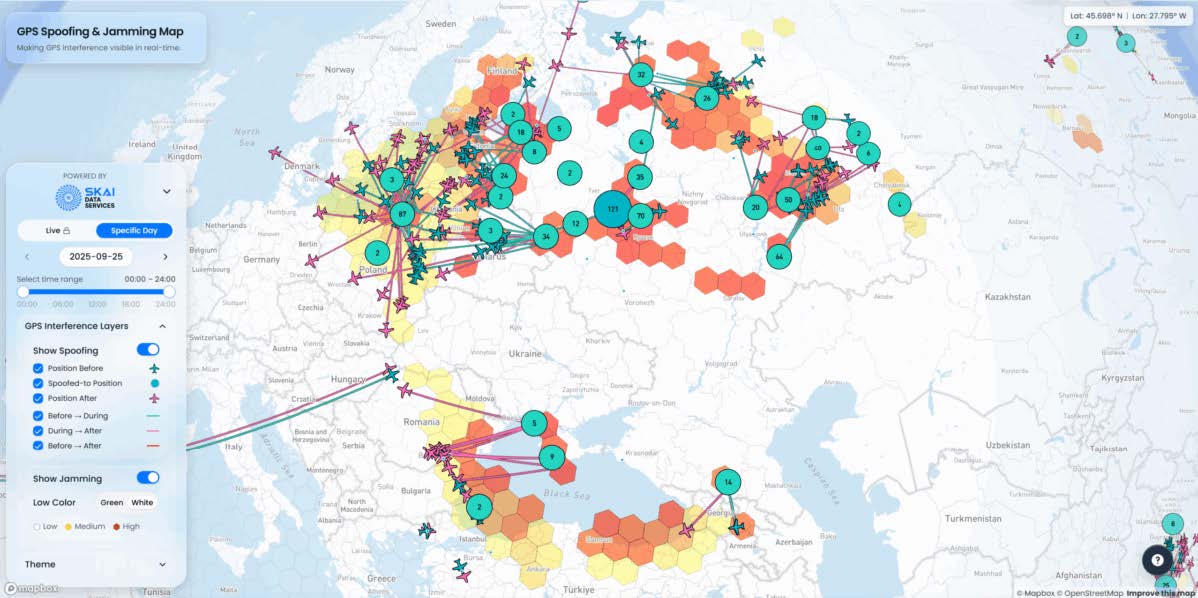
2026年1月2日,美国航空航天公司网站发布文章《全球冲突暴露GNSS漏洞,激发创新》指出,数字航空电子技术委员会推动军民用航空器通信、导航与监视系统发展,而全球冲突(如俄乌战争)使全球导航卫星系统(GNSS)完整性面临挑战,GPS拒止成战术常态,前线频繁出现无人机和弹药因干扰或欺骗导航失灵的情况,航空系统开发商虽在打造具备抗干扰能力的系统,但仍需关键突破保障全球空域安全。检测是首要防线,2025年1月SkAI数据服务推出用ADS - B数据定位干扰活动的实时GPS欺骗与干扰跟踪地图;2月Zephr.xyz获美空军研究实验室合同在乌克兰部署带联网软件的智能手机以绘制干扰图;同月《遥感》期刊中Jin等人介绍用抗干扰阵列天线检测欺骗并估计信号源方向的方法。生存性与连续性方面,5月Sine.Engineering将含混合算法的无人机导航模块产量扩大五倍;6月Calian GNSS推出紧凑型可控接收模式天线(CPRA);8月是德科技发布CPRA性能认证白皮书,防务原始设备制造商也加强防护;1月以色列航空工业将ADA抗干扰系统与M码GPS接收机集成,9月RTX旗下柯林斯航空向欧洲交付首个非国际武器贸易条例的M码NavHub可信PNT解决方案。备用导航受重视,6月Daedalean与MOOG演示70海里无GPS自主飞行,Inertial Labs是德科技推出视觉辅助惯性导航系统。针对视觉与惯性融合的不足,8月DARPA启动稳健量子传感器项目,Q-CTRL获相关合同。监管机构反应不一,FAA发布多份通告,欧洲和中东航空公司因GNSS异常改道。此外,2月Kvertus推出反无人机干扰器及电子战系统,6月DroneShield获6160万美元欧洲合同,将GNSS拒止转化为优势。
欧洲航天局资助GNSS增强型桥梁安全监测系统完成验证。
Inside GNSS网站2025年12月30日报道,欧洲航天局(ESA)资助的Space for Life公司于2025年12月展示了PONTI Box车载监测系统的测试成果,该系统利用GNSS授时与加速度计数据对老化桥梁进行低成本结构健康评估。Space for Life(S4L,前身为Safe Structures Company)在ESA NAVISP Element 2计划资助下,开发了名为PONTI Box的车规级传感器单元,可采集车辆通过桥梁时的高频加速度计数据及精确GNSS授时信息。该系统针对欧美地区桥梁老化危机:仅意大利Autostrade公路网5700公里范围内就有超过3600座结构急需检测,而传统评估方法成本高昂且实施复杂。PONTI系统是S4L先前GAMBE项目的技术迭代,后者利用智能手机检测桥梁振动,而PONTI通过专用硬件与云端分析平台实现了可规模化部署。系统架构基于虚拟化模块(防火墙、数据代理、服务器、存储及Web界面等功能组件),支持多级用户权限管理。在近期由ESA主办的技术评审会上,S4L的Fabio Gerace公布了验证成果:21辆装备PONTI Box的公交车在意大利高架桥上完成超过62000次跨越纪录。数据处理将原始加速度与GNSS信号转换为频谱图,揭示结构动力学响应特征。然而测试也暴露了技术瓶颈:1 kHz采样率(每秒采集1000个数据点)无法可靠检测15 Hz以下的模态频率(结构振动的固有频率特性),隧道及特定桥型还会造成GNSS信号中断。Gerace表示,尽管存在挑战,验证已证实基于卫星定位的车载监测技术可行性,团队正研发采用15 kHz采样率和AI辅助移动实验室的PONTI Box Plus升级版,并计划将技术扩展至路面状况评估。他强调,2018年热那亚Ponte Morandi桥梁坍塌悲剧凸显了延迟监测的人员与经济代价,PONTI展示了空间导航授时(PNT)技术如何为道路管理部门提供可负担、连续且可扩展的公共安全保障方案。
学术动态
西班牙、沙特阿拉伯研究团队在arXiv发表论文《低地球轨道星座作为去中心化全球导航卫星系统网络:优化太空中的定位、导航与授时校正》(LEO Constellations as a Decentralized GNSS Network:Optimizing PNT Corrections in Space)。
2025年12月24日,来自西班牙巴塞罗那自治大学与沙特阿卜杜拉国王科技大学的研究团队在arXiv发表论文《低地球轨道星座作为去中心化全球导航卫星系统网络:优化太空中的定位、导航与授时校正》,提出面向大规模低地球轨道(LEO)星座的去中心化全球导航卫星系统(GNSS)网络架构,实现星载GNSS协同处理和高精度定轨定时。当前LEO卫星搭载的GNSS接收机多为独立运行,定位精度仅达米级,而高精度应用需依赖地面分析中心生成的精密产品,存在延迟大、实时性差的瓶颈。研究创新性地将LEO星座视为空间分布式GNSS观测网络,各卫星通过星间链路与邻近节点交换紧凑信息,协同估计星座级状态。方法层面,研究建立了涵盖卫星位置、速度、时钟偏差、硬件偏差、电离层延迟和载波相位模糊度的网络级估计模型。针对设计矩阵秩亏问题,采用S系统理论进行可估计性分析,确保所有节点收敛至一致参数空间。为应对大规模星座的动态拓扑和通信受限,研究开发了动量加速梯度跟踪算法,将星座建模为时变通信图,通过多轮共识操作增强信息扩散,显著提升收敛速度并降低通信开销。仿真验证基于包含500颗卫星的Walker-Delta星座,每颗卫星仅与4个最近邻居通信。实验对比显示:独立处理的定轨误差为2.95米、时间同步误差为7.95纳秒;网络协同浮点解将精度分别提升至0.12米和0.21纳秒;引入整数模糊度固定后,定轨精度达厘米级(0.06米),时间同步精度达0.11纳秒。消融实验证实,动量加速与多轮共识的协同缺一不可,两者结合使算法线性收敛至中心化基准解。研究意义在于构建了自组织空间GNSS网络,实现无需地面支持的高精度自主定轨定时,为未来自主空间系统提供了理论与算法基础。局限性在于仅模拟GPS观测,未涉及多GNSS融合及真实星间链路的通信噪声影响,后续可扩展至多星座融合和在轨验证。

GPS拒绝环境中的自主导航系统:技术与应用综述(Autonomous Navigation Systems in GPS-Denied Environments: A Review of Techniques and Applications)
2025年2月,该论文在“2025年第11届自动化、机器人与应用国际会议(ICARA)”上发布。论文围绕GPS拒止环境下的自主导航系统展开综述,分析传统GPS导航的局限,梳理替代技术与最新进展,并探讨未来研究方向,旨在为相关领域应用提供参考。
论文首先指出自主导航系统在医疗、农业、物流、军事等领域应用广泛,传统系统高度依赖GPS实现定位、导航与授时(PNT),但GPS信号易受干扰、阻塞或欺骗,在隧道、密林、城市峡谷等GPS拒止环境中可靠性不足,甚至导致系统定位失效。为解决这一问题,论文采用系统文献综述、描述性分析与比较分析方法,筛选2019-2024年IEEE Xplore、ACM Digital Library等数据库的33篇相关文献,围绕GPS拒止环境下自主导航的挑战、替代技术、PNT重要性等核心问题展开研究。
在核心内容部分,论文强调了PNT在自主导航中的关键作用,其涵盖定位(依赖GNSS、北斗、伽利略等系统,结合地面增强系统提升精度)、导航定向(惯性导航系统INS为核心,需传感器融合弥补漂移缺陷)、时间同步(依赖原子钟、NTP、PTP协议)三大模块,广泛应用于国家安全、金融、智能城市等领域。同时,论文详细分析了GPS导航的挑战,包括地形与建筑遮挡导致信号弱、多路径误差引发定位偏差、信号干扰与欺骗,以及商业导航服务依赖第三方卫星图像带来的误差。
针对GPS拒止环境,论文梳理了五类替代导航技术:地面无线电导航利用伪卫星等设备发射信号,适配复杂地形;天文导航结合AI与星跟踪技术,通过天体定位实现抗干扰导航;量子导航借助量子传感器与冷原子干涉测量,波音已通过飞行测试验证其可行性;传感器融合整合IMU、激光雷达、视觉传感器等数据,以INS为核心弥补单一传感器局限;图像处理技术依托计算机视觉算法,结合相机与预建地图实现实时定位。此外,论文还介绍了自主导航的最新进展,包括融合机器学习的路径规划算法、基于CNN与强化学习的深度学习方案、多传感器融合技术,以及SLAM技术在未知环境实时建图与定位中的应用。
论文通过案例研究展示了替代技术的实际应用,如自动驾驶车辆依赖多传感器与车联网通信保障导航安全,亚马逊Prime Air无人机、Zipline医疗配送无人机在城市与偏远地区的自主运行,波士顿动力Spot机器人与NASA火星车在危险或极端环境中的探测作业。最后,论文指出当前技术存在传感器环境适应性差、实时数据处理能耗高、定位漂移、多智能体协同难等局限,提出未来可聚焦量子传感器、磁异常导航、多智能体协同系统等方向,推动GPS拒止环境下自主导航技术的突破。