1.CGI和Vantor公司将合作开发下一代太空智能和导航工具。
军事人工智能文章2026年2月25日报道,CGI与Vantor公司达成合作,联合开发下一代太空智能和导航工具,该工具可分析多源数据,为国防、国家安全及环境任务提供支持,双方计划开拓英国、欧洲及同盟国市场。此次合作融合了CGI在人工智能驱动分析、边缘计算和视觉处理方面的技术优势,以及Vantor的空间智能、地理定位和抗GNSS导航技术,包括其Tensorglobe平台与Raptor系统,旨在即便在GPS拒止或信号衰减区域,也能提供精准位置数据、实时分析和作战导航服务,核心重点是将近实时卫星数据整合至数字指挥控制网络,提升态势感知能力、加快作战决策效率。其中Vantor的Raptor是面向无人机和无人系统的视觉化软件套件,可摆脱对GPS的依赖,借助机载摄像头和3D地形数据实时推算空中位置、匹配视频与地理地图、提取地面精准坐标,模块还支持传感器融合等功能;Tensorglobe则是综合性空间智能平台,能连接卫星、无人机和地面传感器,实现卫星任务自动化、影像转2D/3D地图及安全数据流管理,助力打造持续更新的地球数字模型,支撑多领域测绘、监测和作战规划。

2.IndoTraq推出无线3D位置跟踪技术,突破传统GPS和常规室内定位技术的精度与场景限制。
indotraq网站2026年2月24日报道,IndoTraq推出业内领先的无线3D位置跟踪技术,以毫米级精度、最高150Hz的更新速率打造适配室内外的军事模拟跟踪解决方案,突破传统GPS和常规室内定位技术的精度与场景限制,为国防战术训练提供高保真的现实复刻与客观精细化数据。该技术拥有三大核心产品:HSKT可实现室内150Hz毫米级定位,HSVTI融合视觉数据达成室内100Hz亚毫米级精度,HSGT则将RTK GPS与IMU融合,实现户外100Hz厘米级定位,且在高速机动、GPS信号波动时仍能稳定追踪。其在军事训练中应用场景丰富,在室内近距离作战训练中,可精准追踪士兵及武器动作,分析战术配合与射击操作;在空降、直升机救援、战术车队等动态作战训练中,能分别实现伞兵降落、直升机悬停、军用车辆行驶的高精度追踪,分析各类战术动作细节。此外,该技术还将定位追踪与战后行动复盘深度结合,把主观的复盘讨论转化为数据驱动的科学分析,同时可集成生命体征监测功能,实时追踪参训人员心率、血氧等指标,保障训练安全。该方案支持灵活扩展与定制,可适配从单兵射击到营级联合作战的各类训练需求,在GPS拒止环境中表现稳定,且追踪标签具备防水性,能满足恶劣天气作战训练,助力提升军事训练质量与作战部署信心。
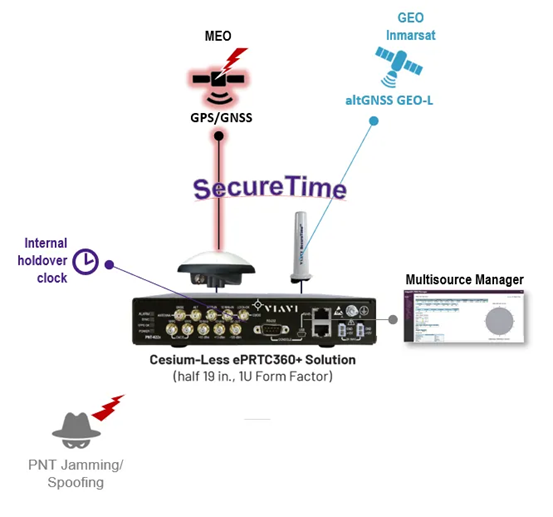
3.VIAVI推出无铯ePRTC360+增强型主参考时钟,打破铯原子钟授时精度垄断。
2026年2月17日,美国测试与测量企业VIAVI Solutions于亚利桑那州钱德勒发布专利待审的无铯保持方案ePRTC360+,该方案成为全球首款在无铯环境下满足ITU-T G.8272.1国际标准的增强型主参考时钟(ePRTC,即电信网络中为全网提供时间溯源基准的顶层时钟节点),旨在以远低于铯钟的成本保障5G网络、电力、交通、航空及AI数据中心等关键基础设施免受全球卫星导航系统(GNSS)干扰威胁。国际电信联盟(ITU-T)G.8272.1标准规定,ePRTC进入保持(即GNSS信号中断后时钟依靠内部振荡器独立维持精度的工作状态)时短期漂移须低于30纳秒,且14天长期漂移须低于100纳秒,全程须可溯源至协调世界时(UTC)。此前,上述指标仅有铯原子钟能够达到。ePRTC360+的推出打破了这一技术垄断,同时整合进VIAVI的SecurePNT 6200产品系列,并已通过多种实战级有源天空干扰/欺骗环境测试。ePRTC360+的抗干扰能力源于两项关键技术的协同。其一,专有altGNSS GEO-L服务,区别于传统GNSS全向信号易受低功率干扰淹没的弱点,该服务利用地球同步轨道(GEO)卫星下行的加密高方向性L波段信号,可在GNSS信号被干扰、欺骗乃至遭受精密转发式欺骗(即攻击者捕获后延迟重放真实导航信号以诱导接收机产生位置/时间误差)攻击时,无时限地维持100纳秒精度。其二,增强型SecureTime GEO抗干扰天线配合抗欺骗天线,可接收带有GPS/GNSS-NMA(导航电文鉴权,用于识别伪造卫星信号)认证的eGNSS GEO服务,实现对欺骗信号的主动检测与缓解,并驱动内置铷振荡器(稳定性优于晶振但低于铯钟的中端原子钟)平滑完成多轨道信号源切换。ePRTC360+在成本与部署灵活性方面对铯钟形成显著超越。铯钟存在诸多限制:对冲击振动敏感、启动流程繁琐且耗时数日、出口须申请ECCN 3A001.i许可证、GNSS学习周期长达40天、铯管约每七年需更换一次,且报废处置被列为危险品作业。相较之下,ePRTC360+规避了上述所有约束,并可通过网状网络精确时间协议(PTP,网络设备间纳秒级时间同步协议)互为备份,进一步增强区域性干扰场景下的端到端同步鲁棒性。ePRTC360+将于2026年3月2日至5日在西班牙巴塞罗那举办的世界移动通信大会(MWC Barcelona 2026)上首次公开亮相。
学术动态
1.增强定位与导航的量子传感器综述(Quantum sensors for enhanced positioning and navigation: a comprehensive review)
2026年2月2日,该论文刊载于GPS Solutions期刊。该论文是一篇关于量子传感技术赋能定位导航的综合性综述,聚焦GNSS拒止/对抗环境下的弹性PNT需求,系统梳理了冷原子干涉、原子气室、超导量子干涉器件(SQUID)、金刚石氮空位(NV)中心等量子传感技术的原理、特性及在定位导航中的应用潜力,分析了量子-经典混合架构的融合价值与实际部署挑战,提出了可部署量子定位导航技术的发展优先级,为科学、工业和国防领域构建抗干扰的导航基础设施提供了理论与技术参考。论文指出,GNSS作为主流PNT技术存在易受干扰、信号遮挡、星座几何不佳等固有缺陷,而量子传感依托叠加、纠缠等量子特性,可实现对惯性力、重力、磁场的无漂移、超高灵敏度测量,且降低对外部信号的依赖,成为弥补GNSS短板的关键技术。研究明确了量子传感器与经典传感器的核心区别,即前者利用经典物理无法完全描述的量子特性,具备全新传感模态、高灵敏度等优势,但也面临退相干、环境鲁棒性不足、小型化难等问题。
论文详细阐述了多种适用于定位导航的量子传感系统:冷原子干涉技术可实现超高精度的惯性、重力测量,是量子惯性导航的核心;原子气室技术无需激光冷却,在室温下即可实现高灵敏度磁场检测;SQUID磁强计磁场探测灵敏度达基准水平,但需低温环境;金刚石NV中心作为室温固态量子系统,支持矢量磁场测量,适配动态导航场景;量子光学技术则通过压缩光、纠缠光子突破经典测量极限。同时,论文梳理了量子惯性测量单元、量子重力仪、量子磁强计等专用传感器的性能指标与应用案例,部分量子传感器已实现亚米级导航精度、微伽级重力测量灵敏度。研究重点分析了量子-经典混合架构的集成价值,指出量子传感器虽性能优异,但存在带宽低、动态范围有限等问题,而经典传感器(如MEMS、光学陀螺)具备高采样率、成熟度高的优势,二者融合可实现优势互补。案例显示,混合惯性导航系统可将定位误差从数米降至亚米级,量子重力仪、磁强计与经典INS结合,能大幅降低GNSS拒止环境下的导航漂移。此外,量子定位系统(QPS)虽理论上可实现亚厘米级定位精度,但目前仍处于实验室理论研究阶段,面临量子信道构建、纠缠光子稳定传输等工程挑战。
论文总结了量子传感技术落地的核心挑战:一是退相干、带宽不足等技术局限,部分设备仍存在体积大、功耗高的问题;二是环境约束,多数量子系统对温度、振动等环境因素敏感,限制了移动平台部署;三是集成难题,量子与经典传感器的工作原理、数据率不匹配,缺乏成熟的融合算法。论文最后提出,量子传感器并非替代经典PNT系统,而是多层PNT框架中的互补方案,未来研发需聚焦传感器鲁棒性提升、小型化设计、与经典系统的无缝集成,同时建立量子性能量化协议。结合2025年国际量子科学技术年与相关国际研究倡议,该研究认为量子传感将成为下一代弹性PNT系统的核心支撑,推动导航技术在GNSS拒止环境下的突破发展。
2.迈向无GNSS同步:一种用于非地面网络(NTN)的改进型基于PSS的频率对准技术(Towards GNSS-Free Synchronization: An Improved PSS-Based Frequency Alignment Technique for NTN)
2026年1月13日,该论文发表于《IEEE通信学会开放期刊》(IEEE Open Journal of the Communications Society)。针对非地面网络(NTN)场景下GNSS失效问题,该文提出基于5G NR主同步信号(PSS)的增强型频率估计技术。随着3GPP在5G/6G框架内推进GNSS-free解决方案,基于低地球轨道(LEO)的定位、导航与授时(PNT)服务因低延迟和强信号优势成为研究焦点。
研究针对n255(L波段)和n256(S波段)两个NTN频段,系统评估实现同步所需的最小信噪比(SNR)。在参考检测算法基础上,引入三项关键改进:利用循环前缀(CP)相关运算、传输多个同步信号块(SSB)、以及精细化频率偏移校正。蒙特卡洛仿真验证了算法在真实SNR范围内的性能,符合3GPP规范(±0.1 ppm载波频率精度)。
实验结果显示,所提方案显著提升性能:使用4个SSB时频率估计误差降低36.7%,完整解决方案(多次突发传输+CP优化)可降低44.9%。SNR增益方面,基础配置下n255频段达7 dB、n256频段达10 dB;完整配置时分别提升至15 dB和18.3 dB。估计性能与克拉美-罗下界(CRLB)对比验证了算法有效性。
研究的核心贡献包括:量化PSS检测的频率估计误差、定义NTN同步的最小SNR要求、分析SS突发和SSB数量对精度的影响、明确CP在估计中的作用、设计渐进式增强方案,并通过蒙特卡洛仿真验证有效性。这些成果为5G/6G非地面网络中的GNSS-free PNT应用提供了可行的技术方案,证明了该同步策略作为GNSS替代方案的鲁棒性。