1.美洛马公司将发射最后一颗GPS III卫星SV10,加速更新美国老化的GPS星座。
Autonomy Global网站2026年3月3日报道,美洛克希德·马丁公司高管在空天军协会战争研讨会上透露,该公司正加速更新美国老化的GPS星座,最后一颗GPS III卫星SV10即将发射,更先进的GPS IIIF系列也已进入生产阶段。当前GPS星座含31颗分四代的中地球轨道卫星,多款老旧卫星超期服役,系统运营迫在眉睫需补新。GPS III卫星在精度、抗干扰能力上大幅提升,新增安全信号与兼容型民用信号,搭载的军用加密M码信号抗干扰和欺骗能力更强,且该公司已实现多颗GPS III卫星的快速发射部署。即将发射的SV10在保有核心性能基础上,新增首创性光交联演示载荷和数字铷原子频标实验,其技术集成仅耗时18个月,验证了现役平台快速植入新能力的可行性。GPS IIIF作为GPS III的升级款,保留原有核心信号并强化军用M码,新增区域军事保护功能,可大幅提升特定区域信号功率,从根本上提升抗电子攻击能力,同时还延续了核爆探测、搜救载荷,卫星本身也做了核加固设计。洛克希德·马丁认为未来PNT体系是多源生态而非单一替代,GPS IIIF虽能提升GPS在对抗环境中的生存能力,但在GPS拒止场景仍需其他补充手段。目前该公司已签约的12颗GPS IIIF卫星均已进入生产环节,首星完成集成测试,四颗处于不同组装阶段,稳定的生产与新载荷的快速集成将保障GPS服务的连续性和未来太空对抗环境下的韧性。

2.欧洲航天局资助项目RIGOUR完成验证:大数据方法有望重塑GNSS完整性监测体系。
Inside GNSS网站2026年3月9日报道,英国GMV NSL公司在欧洲航天局(ESA)资助下完成“基于机会接收机的GNSS实时完整性监测”(RIGOUR)项目,验证了以大数据方法替代或补充传统专用地面参考站、实现卫星导航完整性监测的技术可行性。现有GNSS完整性架构高度依赖专用参考站网络。RIGOUR另辟蹊径,转而采集智能手机及车载导航终端等大众设备的“机会测量数据”。尽管此类接收机的测量噪声远高于专业设备,但项目团队认为:当数据源规模达数万用户时,大样本统计效应足以弥补单点质量的不足,从而得出关于卫星信号状态的鲁棒性结论。项目团队开发了专用仿真平台与GNSS完整性处理器(GIP),模拟了10000台接收机在农村、城市及高密度环境中的工作场景。系统评估了两类互补服务:卫星完整性,通过汇聚广域用户数据检测卫星故障,输出定位保护级别所需的用户差分距离误差标准差(Sigma UDRE)等参数;局部完整性,借助城市高密度用户集群识别多径、遮蔽及干扰等环境影响,并对问题区域动态调整安全裕量。仿真结果表明,该处理器可有效检测中等至较大量级的卫星异常,农村低噪声数据对提升监测性能尤具价值;局部完整性方案在高密度场景中效益显著,但针对非视距(NLOS)等严重城市效应仍需更精细的建模与多传感器融合。随着联网导航设备持续增长,大数据完整性监测有望成为现有基础设施的有力补充,为交通运输及自主系统等场景提供新型安全保障。
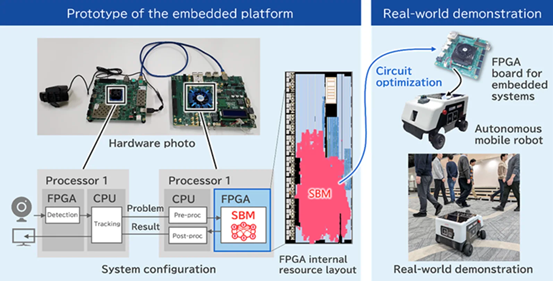
3.东芝与MIRISE完成量子启发优化芯片车载部署,自主机器人实时导航能力获突破性验证。
Quantuminsider网站2026年2月25日报道,东芝公司与MIRISE技术公司宣布,全球首次将量子启发式优化计算机直接嵌入自主移动机器人车载系统,实现了复杂动态环境下的实时多目标跟踪与自主导航,相关成果已发表于《自然·通讯》等三本学术期刊。此次部署的核心硬件为东芝自研的模拟分叉机(Simulated Bifurcation Machine,SBM)——一种运行于标准半导体器件之上、算法原理源自量子力学的组合优化加速引擎。与真正的量子计算机不同,SBM无需低温冷却或特殊材料,可直接运行于现场可编程门阵列(FPGA,一种可重构的专用半导体芯片)等通用硬件。在技术实现层面,研究团队针对SBM架构开发了一套新型多目标跟踪算法,并借助专有电路设计将其部署于嵌入式FPGA。该算法将目标关联问题建模为组合优化匹配任务,在传统一对一匹配的基础上,引入一对多候选机制,显著提升了目标遮挡后的重识别能力。性能测试表明:在标准评估指标高阶跟踪精度(HOTA)上提升4%;在专项遮挡压力测试基准上提升幅度高达23%。系统处理帧率达23帧/秒,远超自动驾驶系统通常要求的10帧/秒下限,具备充足的实时冗余余量。此前量子启发式优化系统均以服务器集中部署形式运行,通过网络远程控制机器人集群。本次实现车载边缘化部署,意味着感知-决策延迟得到根本性压缩,且系统不再依赖网络连接——这对战场、仓储及无人配送等通信受限场景具有重要工程价值。在实地验证阶段,MIRISE将搭载SBM的FPGA板载于自研自主移动机器人,在包含静态障碍物与动态行人/车辆的真实环境中完成导航试验。系统通过实时分析目标位置置信度与运动方向预测其未来轨迹,并动态调整路径规划的安全占用区域,在保障安全间距的同时有效减少不必要的绕行。两家公司表示,后续将把该技术拓展至多机器人协同调度、复杂空间路径优化以及工厂/仓储/农业/基础设施监控等更广泛的嵌入式自主系统领域。