美国陆军发布MAPS Gen II系统信息征询书,要求新承包商移交知识产权以解决政府缺乏技术数据权利的问题。
突破防务网站2025年12月18日报道,美国陆军发布了针对第二代车载保障型定位、导航与授时系统(MAPS Gen II)新一轮采购的信息征询书。此次采购的核心特征在于陆军提出了一项在国防采办中较为罕见的强制性要求:主承包商必须向政府移交系统的全部知识产权。根据征询文件,陆军明确指出政府当前缺乏充分的技术数据权利,包括详细设计图纸、技术文档以及软件源代码,这导致政府无法向第三方提供完整的“按图制造”技术资料包以支持生产活动。因此,陆军在征询书的“知识产权”章节中,要求潜在供应商详细说明其将提供的技术文档范围,包括设计规范、系统架构图、维护手册等作为合同数据包的组成部分。MAPS Gen II系统的功能定位是为地面车辆提供定位、导航与授时数据,特别是在全球定位系统拒止环境下保持导航能力。该项目现行合同由雷神技术公司旗下的柯林斯航空航天公司持有,系统于2025年3月获批进入全速率生产阶段,并于同年9月开始向部队交付,现行合同计划执行至2027年9月底。此次知识产权转移要求与美国陆军高层近期的政策倾向密切相关。陆军部长德里斯科尔和装备司令部司令莫汉中将均公开主张陆军应加强从供应商处获取知识产权,避免放弃对装备系统的维修权。莫汉中将指出,由于陆军不拥有武器平台众多零部件的知识产权,导致在需要更换零件时难以经济高效地进行逆向工程或3D打印制造。关于生产规模,陆军要求供应商具备每月生产150套系统的能力,并在合同授予后12个月内将产能提升至每月300套。信息征询书的响应截止日期为2026年1月19日。

美特种作战训练人员寻求扩大军方可干扰蜂窝和GPS信号的区域,以开展电子战与无人机的研发和训练。
防务一号网站2025年12月17日消息,美国特种作战训练人员正请求政府监管机构扩大军方可干扰蜂窝和GPS信号的区域,以模拟现代战争环境开展电子战与无人机的研发和训练。美国陆军约翰·F·肯尼迪特种作战中心与学校(SWCS)官员称此需求紧迫,因乌克兰战场显示无人机和电子战重要性激增,如今美军需在更强、更普遍的干扰环境下作战,俄罗斯部分无人机已用高性能芯片减少对可干扰通信或导航系统的依赖,受训学员熟悉这些趋势并期望训练融入相关内容。该中心今年推出陆军战术信号情报与电子战新课程,已完成一期试点(7-10月,15名学员),明年5月将开新班,还于2024年3月成立新机器人分遣队、5月设机器人技术人员专项岗位,中心指挥官杰森·斯莱德少将称这些举措契合战争新现实。但在美国本土训练受限,民用部门严格限制GPS干扰器等使用,SWCS正准备申请文件,拟提交给联邦航空管理局(FAA)、联邦通信委员会(FCC)等机构,寻求增加临时训练地点,此前类似推进困难,如今因五角大楼新政策才有望开展相关讨论。国会也有所关注,最新《国防授权法案》含改善测试场地可用性及要求电子战成为特种作战部队未来部分演习内容的条款。目前美军常进行蜂窝和GPS干扰演练/实验的场地仅新墨西哥州白沙导弹靶场和内华达测试与训练靶场,偶尔在其他地点测试需FAA许可,2025年FAA仅发布10次GPS中断预告,而美国对手可在乌克兰前线获取相关作战数据,无需复杂流程。
欧盟航空安全局与拉丁美洲伙伴国正在推进卫星增强系统技术合作项目。
Inside GNSS网站2025年12月15日报道,欧盟航空安全局(EASA)正在实施一项由欧洲与南美伙伴国共同推进的卫星增强系统(SBAS)技术合作项目。欧盟-拉丁美洲及加勒比航空伙伴关系项目第二期已于2025年9月正式结束,但参与国政府和区域组织已明确表达继续合作意向,计划在第三期项目中将SBAS列为优先技术领域,以维持技术和机构层面的持续参与。2025年4月,EASA在组织召开区域性研讨会,会议期间各方建立了常设SBAS工作组,负责协调参与国和空中导航服务提供商之间的规划、技术对接和实施工作。项目活动体系围绕六个实践支柱构建,包括治理与机构安排、电离层监测与建模、验证演示平台、成本效益与融资分析、能力建设与培训,以及实施路线图。截至2025年底,参与方已制定下一阶段工作重点,聚焦于分阶段演示验证概念和测试平台建设,包括SBAS修正信号测试以及带垂直引导的定位器性能(LPV)程序验证。参与方确定了西班牙技术咨询公司Indra作为工业贡献者之一,并将区域空中导航服务提供商和欧洲SBAS专家纳入技术支持网络。初步确定演示系统设计和初期现场试验将于2026年年中启动。相关方还研究了未来建立区域数据共享中心的可能性,并确定利马、波哥大和巴西利亚为候选试点机场,用于支持SBAS演示系统部署。同时,正在讨论针对空中导航服务提供商工程师和监管人员的专项培训队伍建设计划。下一次工作组会议预计将于2026年初召开,以确认演示站点、时间进度和融资方案,并在国家层面启动协调性实验室到现场的测试活动。

学术动态
应用深度学习方法进行无人机GPS伪装检测,利用可解释人工智能(Applying Deep Learning Approach for GPS Spoofing Detection of UAV with Explainable AI)
2025年9月,该论文在“2025年AIAA DATC/IEEE第44届数字航空电子系统会议(DASC)”上发表。论文聚焦无人机(UAV)GPS欺骗检测难题,提出融合可解释AI(XAI)的CNN-BiLSTM混合深度学习模型,旨在解决传统检测方法精度低、分类粗、缺解释性等问题。
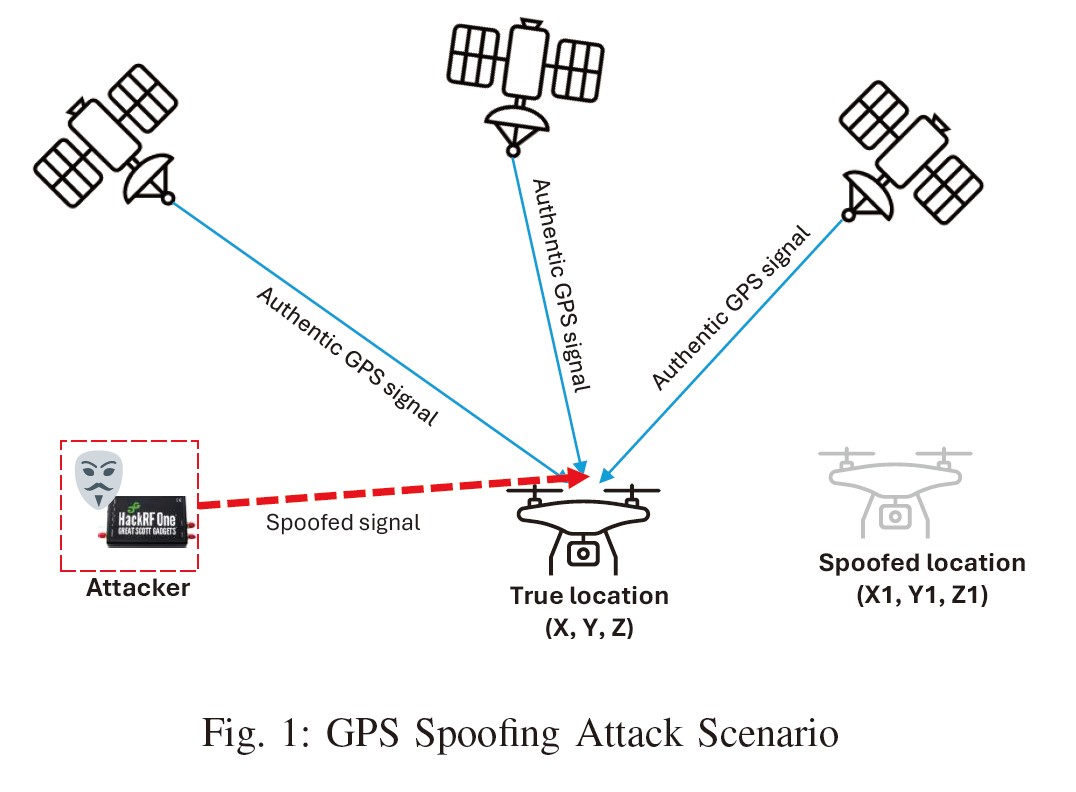
研究背景方面,无人机在航拍、农业、救援等领域应用广泛,但易受GPS欺骗攻击——攻击者通过虚假信号误导无人机获取错误定位、导航与授时(PNT)信息,可能导致无人机偏航、坠毁或被恶意利用。2011年伊朗捕获美军RQ-170无人机、2024年日均1500架航班受欺骗影响等案例,以及低成本软件无线电(如HackRF)的普及,凸显威胁严重性。GPS欺骗攻击分为简单型(高功率噪声干扰,易检测)、中间型(模拟真实信号伪装多径干扰,需多天线监测)、复杂型(用载波相位同步设备欺骗多天线接收机,难检测)三类。传统检测方法如子空间投影、天线阵列等存在计算效率低、依赖额外硬件等局限,普通机器学习模型也难以处理GPS信号的非线性与高维特征,且缺乏细分类能力。
研究方法上,首先构建数据集,包含8通道GPS接收机与USRP软件无线电捕获的真实信号(覆盖静态/移动场景,提取13个特征),以及模拟的三类欺骗信号;预处理阶段用MinMaxScaler标准化特征,SMOTE技术解决数据不平衡(原始数据约30万真实样本、10万欺骗样本,处理后各类样本均达40万)。接着设计CNN-BiLSTM模型,通过2层1D卷积层(64个滤波器、核大小3、ReLU激活)提取空间局部特征,BiLSTM层(64个隐藏单元)捕捉时序依赖关系,最终经全连接层与Softmax激活将信号分为“真实”“简单欺骗”“中间欺骗”“复杂欺骗”四类,模型采用Adam优化器(学习率0.001)、交叉熵损失函数,训练15轮,批次大小32。同时引入SHAP技术,基于博弈论计算特征重要性得分,提升模型可解释性。
实验结果显示,CNN-BiLSTM整体精度达97.87%,超SVM-CNN(97.81%)、CNN(97.79%)、GRU(97.84%)等模型,对各类信号F1值均超96%,复杂欺骗F1值超99%;传统机器学习模型中随机森林精度最高(94.27%),远低于该模型。SHAP分析发现,Feature_9对复杂欺骗分类至关重要,Feature_1、Feature_2对中间欺骗识别影响显著,为特征优化提供依据。
研究意义在于首次实现GPS欺骗“四类细分类”,结合SHAP解决深度学习“黑箱”问题,为无人机GPS安全提供高效可信方案。未来将推进模型实时部署、融合多传感器数据、研究欺骗缓解策略,并扩展检测范围至GLONASS、北斗等其他GNSS系统。
GPS、伽利略以及使用SwaP-C接收机在国防应用中的综合性能(GPS, Galileo, and Combined Performance Using SwaP-C Receiver for Defence Applications)
2025年3月,该论文发表于“2025年第4届国际靶场技术会议(ICORT)”。论文聚焦多GNSS系统(GPS与伽利略)在国防应用中的性能,通过SwaP-C(尺寸、重量、功耗经济高效)接收机开展实验,对比单系统与组合系统的定位精度,为印度国防领域的精准导航需求提供技术参考。
论文指出,卫星导航系统对国防至关重要,GPS虽广泛应用于导弹制导、直升机任务等,但印度复杂地理环境及单一系统易受干扰的问题,推动了多GNSS集成的需求。伽利略系统作为欧洲GNSS,能补充卫星覆盖、提升抗干扰能力,其Open Service Navigation Message Authentication(OSNMA)功能还可检测欺骗攻击;而SwaP-C接收机(如uBlox ZED F9P)因小巧、轻便、低成本(不足1000美元),适合部署于无人机、搜救设备等国防平台,成为研究核心载体。
实验于2023年8月在印度东部昌迪普尔靶场搭建基站,采用uBlox ZED F9P接收机与Skytraq测量级天线,以1Hz速率连续24小时采集数据(86400个历元),分别记录GPS(L1/L2信号)、伽利略(E1/E5信号)及二者组合模式的数据,并用开源软件RTKLib处理,以精密单点定位(PPP)坐标(水平精度2mm×3mm、垂直精度1cm)为基准评估性能。
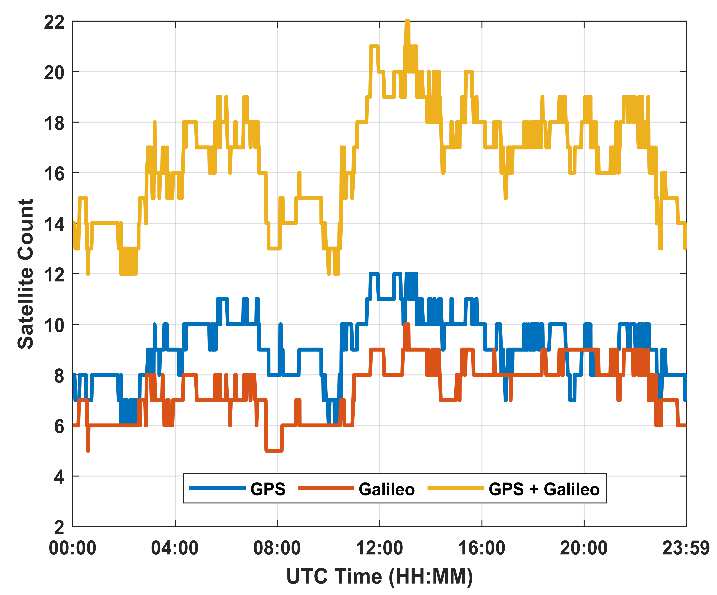
结果显示,GPS与伽利略单系统性能存在差异:1小时短时长数据中,GPS二维精度优于2米,优于伽利略(不足5米);24小时长时长数据中,伽利略三维精度更优(优于7米),GPS三维精度约5米。二者组合模式表现最佳,不仅二维、三维精度均超单系统,还提升了卫星可见数量(GPS为6-12颗、伽利略为5-10颗,组合后达12-22颗),同时降低东、北、天向误差,尤其优化了水平定位精度。此外,精度存在时间波动,日出前因电离层稳定性能更佳,白天受太阳活动、卫星几何不佳等影响,精度有所下降。
论文结论强调,GPS与伽利略组合对印度国防意义重大,能在边境监视、无人机导航、导弹制导等场景中提供冗余与抗干扰能力,即使GPS信号薄弱也可保障精准定位。未来印度需进一步提升本土NavIC系统性能,推动其与GPS、伽利略等系统的互操作性,并结合AI/ML技术减少误差,助力国防导航系统实现自主可靠与战略安全。