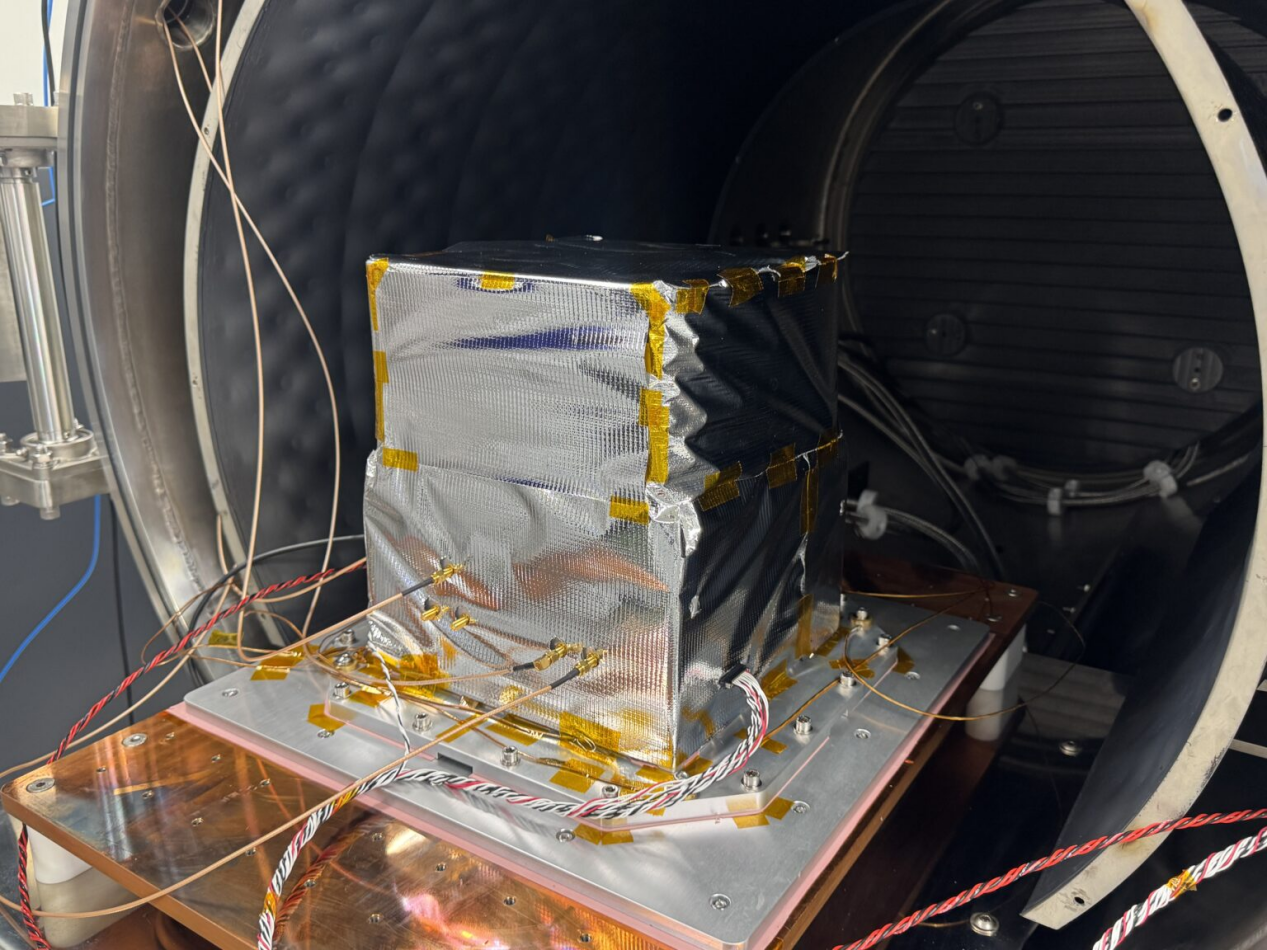
1.QuantX Labs完成光频梳在轨部署,开展全球首台在轨光原子钟核心子系统验证。
Quantum Computing Report网站2026年3月30日报道,澳大利亚QuantXLabs公司依托本国主导的KAIROS计划,通过SpaceX发射任务搭载Exotrail公司spacevan™轨道转移飞行器,将为TEMPO.Space光原子钟配套的光频梳载荷送入轨道,开展该类设备全球首次在轨性能测试,为2026年晚些时候完整光原子钟系统的部署奠定基础、降低技术风险。本次送入轨道的光频梳(Optical Frequency Comb),是QuantX Labs旗下TEMPO.Space光原子钟的核心关键子系统。本次轨道演示任务的核心目标,是验证该光频梳架构在空间环境下的机械、热学与环境稳定性,为公司积累核心航天应用履历,为2026年内完整TEMPO.Space系统的部署降低技术风险。从技术定位来看,光频梳是将高频光振荡转换为可实用电子定时信号的核心接口单元。相较于传统微波原子钟,光原子钟具备显著更高的计时精度,但其输出信号必须经过下变频处理,才能与现有定位、导航与授时(PNT)系统完成集成。本次任务是全球范围内同类光频梳设备的首次在轨性能测试,将采集系统在轨道工况下保持精度的能力数据;而该子系统的在轨验证,是计划成为全球首台在轨运行光原子钟的TEMPO.Space系统投用的必要条件。本次部署是澳大利亚自主航天能力建设的重要组成部分,获得澳大利亚航天局“地月计划”(Moon to Mars initiative)与先进战略能力加速器(ASCA)的支持。除基础授时功能外,该技术可提升导航系统抗干扰韧性,满足对地观测网络、先进通信基础设施的高精度同步需求。KAIROS计划由阿德莱德大学、SmartSat合作研究中心、澳大利亚国防科技集团(DST Group)协同推进,核心目标是实现高精度量子授时技术从实验室环境向航天级硬件的工程化转化。
2.Hackaday Hackday网站发布文章《激光测距使GPS卫星更加精准》。
2026年3月29日,HackadayHackday网站发布文章指出GPS这类全球导航卫星系统已大幅提升地球定位的便捷性与精准度,而当下一项新创新进一步实现技术升级,即给新发射的GPS卫星搭载激光后向反射器阵列,借助地面激光可精准测算出与卫星间的距离。该激光后向反射器阵列与阿波罗任务期间留在月球上的同类装置原理相似,其除了助力GPS定位精度提升,还对大地测量学等科学研究作用显著,大地测量学主要研究地球的形状、引力及长期自转规律,相关研究数据也能为地球观测卫星提供重要支撑。同时,激光测距也是确定卫星地心轨道的关键技术,依托该技术可实现高度计的精准校准,还能提升各类长期测量工作的准确性。目前新发射的GPS III SV-09卫星已正式投入运行,为美国国家航空航天局的大地测量项目提供了更多数据支撑,而随着后续更多配备激光后向反射器阵列的GPS卫星完成发射并投入使用,GPS整体的测量精度还将得到进一步提升。
3.VectorNav为战术级IMU与GNSS/INS全系列产品新增高过载测量能力。
Inside GNSS网站2026年3月25日报道,美国VectorNav Technologies公司发布公告,为旗下战术级惯性测量单元与全球导航卫星系统/惯性导航系统全系列产品新增高过载量程配置,以满足国防领域高动态平台的导航需求。目前,相关工程样件已开放测试评估。本次升级为战术级产品系列新增90G、250G两款量程加速度计,以及4000°/秒量程陀螺仪,主要解决高动态、GPS拒止或降级环境下的导航解算完整性问题,可在发射、拦截、大过载机动等传统传感器失效的关键任务阶段,为平台提供稳定的惯性测量数据,支撑强韧定位、导航与授时(PNT)服务。该升级覆盖VN-110惯性测量单元(IMU)、VN-210/VN-310惯性导航系统(INS)全系列产品。与此同时,该高量程配置与现有平台实现完全直插兼容,无需修改外形、安装适配与功能设计,可直接完成现有系统的快速升级,适配高速拦截平台、快速响应打击系统、高超声速先进机动飞行器、反无人机与防空系统、下一代精确制导等核心应用场景。该系列产品均在VectorNav位于达拉斯的AS9100认证工厂完成设计、生产与测试,工厂年产能达数万套。为应对全球强韧PNT需求的快速增长,公司将于2026年新建10万平方英尺的生产研发设施,扩大产能与研发能力。目前升级后产品的工程样件已开放测试评估,相关技术与采购需求可通过官方渠道对接。
学术动态
1.基于LEO的6G载波相位定位:设计见解及与GNSS的比较(LEO-based Carrier-Phase Positioning for 6G: Design Insights and Comparison with GNSS)
2026年3月18日,该论文发表于arXiv。该论文聚焦6G中基于低轨卫星(LEO)的载波相位定位技术,设计专属定位框架并与全球导航卫星系统(GNSS)展开收敛性对比,论证了LEO基蜂窝定位作为GNSS高精度定位补充与替代方案的可行性,为6G非地面网络(NTN)定位导航授时(PNT)服务提供核心设计思路。论文指出,5G NR引入NTN后,LEO卫星凭借600km轨道高度的强信号、宽带宽优势,相较20200km轨道的GNSS能缩短首次定位时间,还可降低终端对GNSS射频的依赖。但传统时延定位受多因素限制无法实现厘米级精度,载波相位测量虽能实现高精度测距,却存在整周模糊度解算难题,且现有研究多聚焦机会信号、未考虑NR-NTN约束,陆地5G-A载波相位技术也无法直接适配LEO的高多普勒效应,因此亟需适配LEO-NTN的联合时延-载波相位定位框架。
论文先分析载波相位测量与跟踪的核心问题:载波相位由可观测的小数相位和未知的整周模糊度组成,多历元联合处理可解算模糊度,但LEO-NTN存在相位连续性维持难、频率估计精度要求高、PRS间歇传输导致相位跟踪中断等挑战。对此,论文提出双波形设计方案,将宽带PRS用于时延估计、连续窄带载波用于相位跟踪,窄带载波仅需1个物理资源块,可灵活部署在保护带,兼顾相位连续跟踪与通信吞吐量。同时,论文对比了LEO与GNSS的载波相位演化特性:LEO卫星7.5km/s的轨道速度带来更大的多普勒频移和速率(2GHz载波下多普勒速率600Hz/s),导致多普勒线性近似的相位误差更大,但可通过非线性相位模型优化,且其快速运动带来的强时空多样性,成为提升定位收敛性的关键。
在收敛性分析与定位性能验证中,论文搭建了含840颗卫星的LEO星座与符合IS-GPS-200M的GNSS星座仿真模型,从三方面展开对比:一是相位演化变换矩阵条件数,LEO因卫星几何结构快速变化,矩阵条件数在200秒内收敛,远优于500秒仍未收敛的GNSS;二是整周模糊度解算,联合时延-载波相位测量后,LEO在0.5-1秒内完成解算,GNSS3秒内仍未实现;三是定位精度,时延定位中GNSS因专用定位优化略占优,但二者均无法达厘米级,而联合定位下,LEO在500ms内实现厘米级精度,GNSS因残留模糊度误差仍局限于米级。最后,论文梳理了该技术落地的开放问题,包括LEO卫星相位相干性与载荷约束、高多普勒环境下的周跳检测与恢复、鲁棒的整周模糊度解算方法、向动态定位与网络定位的扩展、LEO与GNSS的载波相位融合,以及3GPP标准化中的PRS设计、波形复用等问题,为后续研究指明方向。
2.在GPS信号退化与欺骗环境下确保小型无人机系统间隔的鲁棒多智能体强化学习(Robust Multi-Agent Reinforcement Learning for Small UAS Separation Assurance under GPS Degradation and Spoofing)
2026年3月30日,该论文发表于arXiv。该论文针对GPS退化与欺骗下小型无人机系统(sUAS)的鲁棒间隔保障问题,提出一种基于多智能体强化学习(MARL)的解决方案,将GPS观测污染建模为智能体与对手的零和博弈,推导闭式对抗扰动表达式并融入近端策略优化(PPO)算法,通过仿真验证该鲁棒策略在35%的污染水平下仍能实现近乎零的碰撞率,显著优于无对抗训练的基线策略,为城市空域sUAS自主间隔保障提供了鲁棒性方法。论文指出,城市空域sUAS的规模化运营依赖GPS进行定位测速,但城市峡谷会引发10–60米的多路径误差,GPS信号还易受欺骗攻击,且sUAS交通管理依赖基于GPS的协同位置广播,一处GPS污染会导致整体空中交通状态观测不可靠,而现有MARL间隔保障方法均假设状态观测完美,无法适配GPS受扰场景。
论文将该问题建模为带对抗观测污染的马尔可夫决策过程(MDP),引入R-污染不确定性模型:观测以概率R被对手在有界集内扰动,以概率1-R保持准确,奖励由真实状态计算,确保碰撞等物理事件的客观性。核心控制目标是找到在最坏情况有界污染下最大化期望折扣回报的策略。为解决该问题,论文先基于价值函数的一阶泰勒展开,推导出最坏情况对抗扰动的闭式表达式,证明该表达式对真实最坏扰动的逼近误差为扰动幅度的二阶量,实现了状态维度的线性时间评估,无需对抗训练。同时提出基于KL散度的双正则化项:扰动不变正则化促使策略在清洁与受扰观测下做出相似决策,锚定正则化防止鲁棒训练偏离清洁观测下的标称最优策略,并证明该正则化能将清洁与受扰观测下的安全性能差距限制为与污染概率线性相关。
论文将闭式对抗策略融入MARL的PPO算法,设计共享演员-评论家网络架构,采用集中式训练、分散式执行模式:先在清洁观测下预训练标称教师策略并冻结参数,再在R-污染观测下训练鲁棒策略,对手基于冻结的价值函数生成扰动,避免与策略共适应。整体训练目标融合了PPO裁剪损失、价值损失、熵奖励及两种正则化损失,平衡了策略的鲁棒性、探索性与标称性能。在BlueSky空管模拟器中,论文以亚马逊MK30 sUAS为模型,在含交叉与合并航路的城市空域场景开展实验,对比鲁棒策略与标称策略在不同GPS污染率下的表现,并做正则化项的消融研究。结果显示,清洁观测下两者性能相当,鲁棒训练未牺牲标称能力;污染率升至35%时,鲁棒策略仍保持近乎零的近空碰撞(NMAC)数,而标称策略在25%污染率下碰撞数便急剧上升;消融研究验证了两种正则化项的互补性,缺一则会导致训练不稳定或高污染下性能骤降。论文的核心贡献在于推导了二阶精度的闭式对抗扰动表达式、证明了KL正则化对性能损失的界值、设计了适配sUAS场景的鲁棒MARL算法,最终通过仿真验证了该方法在GPS退化与欺骗下的间隔保障有效性,为低空空域sUAS的安全运营提供了理论与方法支撑。