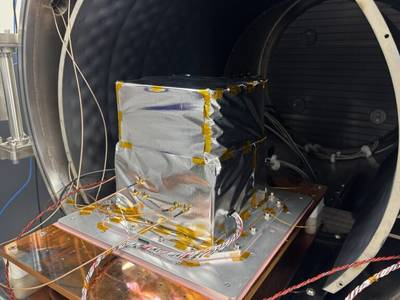
1.澳大利亚本土量子技术将支持该国国防战略落地。
MarineLink网站2026年5月7日报道,澳大利亚本土企业QuantXLabs研发的新型量子时钟TEMPO已部署至太空,性能达现有基于GNSS授时系统的10倍,可在GPS受干扰、欺骗或失效时,提升卫星与地面系统间通信韧性、导航精度及同步稳定性。该公司还与阿德莱德大学合作研发量子磁力计SENTIO,能在无GPS环境下探测水下与地下目标,无需依赖传统声学信号,是水下战领域极具潜力的技术。澳大利亚政府上月发布了《2026年国防战略与综合投资计划》,未来十年投入4250亿澳元,将水下战、高韧性多轨道卫星通信列为首要与第七大优先事项,综合投资计划另划拨90亿至120亿澳元强化太空能力,聚焦构建高韧性多轨道国防卫星通信体系,而TEMPO这类精密原子钟是卫星星座同步与抗电子攻击通信安全的核心基础。此外,阿德莱德大学的Nigel Spooner教授与Erik Shartner博士通过合作企业TeraGlo,研发用于海底采矿的量子传感器,可实时识别与量化物质,还开发适用于泥浆录井的量子传感器,能近实时检测岩屑、减少传统分析需求。澳大利亚核科学与技术组织指出,量子传感依托量子系统对外界扰动的高灵敏度,可探测极微小变化,具备精度更高、可自校准无需定期复检、体积小可微型化三大优势,在国防领域可用于定位、导航授时、态势感知、人机交互及国防科研工业等多个方向。
2.美橡树岭实验室研制便携式GPS欺骗实时检测仪,移动状态下可分辨真假信号。
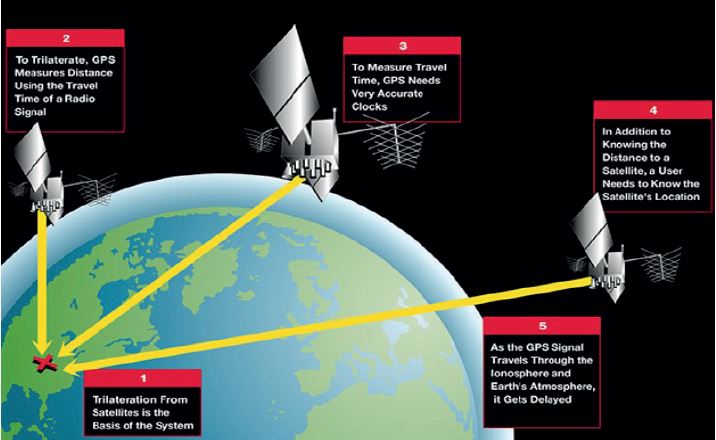
Tech Xplore网站2026年5月3日报道,全球定位系统(GPS)在交通与物流中扮演着关键基础设施角色,但其“基于信任”的信号机制正面临严峻挑战。相较于通过噪声淹没真实信号的GPS干扰,欺骗攻击更为隐蔽且危险,攻击者发送精心构造的虚假卫星信号,可悄无声息地篡改接收机上报的位置或时间信息,而所有监控界面依旧显示“正常”。为弥补可靠防欺骗手段的缺失,美国能源部橡树岭国家实验室(ORNL)在Austin Albright的带领下,整合射频传感、数学计算与嵌入式系统技术,研发出首款高灵敏度、可移动的便携式GPS欺骗实时检测仪。该装置最突出的特点是:即便伪造信号与真实信号强度完全相等,它仍能高效区分欺骗,这是目前已知其他系统尚不具备的功能。与此同时,无论攻击者伪造全部还是仅部分卫星信号,也不管接收设备处于静止还是高速机动状态,该检测仪都能可靠地检出位置、时间及数据层面的欺骗。在技术实现上,该检测仪并不依赖传统GPS接收机或任何已知的参考信号源。它采用软件定义无线电直接获取射频信号,并利用嵌入式图形处理单元(GPU)对射频波形进行实时数学解算,从而独立完成欺骗特征辨识。目前团队正致力于降低设计与制造成本,推动其走向广泛应用。在近期美国国土安全部组织的一次测试中,ORNL的检测仪性能显著优于行业现有的商用系统。这一突破的背景是日益猖獗的GPS欺骗犯罪。货运监视网站每日追踪到成千上万起飞机遭遇干扰及数百起欺骗事件,国际犯罪网络已利用欺骗技术盗窃长途重载卡车。近期更有一家知名龙舌兰酒公司因欺骗攻击,导致每一个批次的运输路径完全被伪造,整车货物遭劫。更为严重的是,若枪械、药品或放射性材料运输遭到欺骗诱导,这些危险品将在毫无察觉的情况下流入非预定接收者,构成重大安全威胁。Albright强调,司机需要像一氧化碳报警器那样对无形危险拥有即时感知能力,“欺骗检测对于预警新型无形威胁至关重要”。为此,研究团队正协助国际电气电子工程师学会(IEEE)制定针对定位、导航与授时设备的抗欺骗韧性认证国际标准,并计划对卡车运输业的GPS欺骗威胁基线展开研究,以量化行业风险,持续提升美国运输安全水平。
3.五月花通信发布NavGuard 750集成式M码抗干扰系统,面向严苛SWaP约束平台。
Inside GNSS网站2026年5月5日报道,美国马萨诸塞州贝德福德市的五月花通信公司(Mayflower Communications)近日正式推出NavGuard 750集成式M码抗干扰系统(IMAS)。该公司拥有美国太空司令部指定的军用GPS接收机研发资质,其声称该系统为当前市场上结构最紧凑的全集成化APNT产品。系统研发获得美国太空军、加拿大国防部及美国海军信息战中心太平洋分部联合资助,并已在竞争性导航战环境下完成多项测试。目标搭载平台涵盖小型舰船、无人水面艇、无人机系统、地面战斗车辆、机器人以及固定翼与旋翼飞机。在技术构型上,NavGuard 750集成了多项核心组件。其采用直径4.5英寸的受控接收方向图天线阵,兼容北约标准固定辐射方向图天线安装座,内部整合了五月花公司技术成熟度达TRL 9级(即系统已完成实际环境验证,代表最高技术就绪等级)的MAGNA-I GPS抗干扰方案。同时内置一部支持L1/L2双频同步接收的军用GPS接收机、一套微机电惯性测量单元(MEMS IMU)及一款芯片级原子钟。该系统的抗干扰架构采用7通道设计,可针对多个同时出现的窄带与宽带威胁提供超过40分贝的干扰抑制能力,并能应对旋翼桨叶调制这一特殊电磁环境。系统还新增了干扰源来波方向测定与信号分类功能,用于提升导航战态势感知水平。此外,其可向外部多部GPS接收机同时输出受保护的射频信号。五月花通信政府项目高级总监约瑟夫·托马斯在报道中评论称,在当前导航战环境下,GPS韧性对任务成功至关重要,IMAS为作战人员提供了最小型化、全集成且经实战验证的APNT解决方案。
学术动态
量子传感及其在印度军事导航系统中的应用(Quantum Sensing and its Applications in Indian Military Navigation Systems)
2026年5月8日,该论文刊载于印度观察家研究基金会(ORF)网站。本文聚焦量子传感在印度军事导航定位授时(PNT)系统的应用,指出印度依托国家量子任务已取得一定进展,但需由国防部主导更精细协同的推进策略,强化PNT系统韧性是印军优先事项。
论文先梳理经典PNT系统的技术框架与局限。PNT是现代军事核心支撑,定位分航位推算与位置固定,授时分航位推算与时间同步,主流依赖GPS、NavIC等卫星导航。但经典系统存在致命短板:易遭电子战干扰欺骗、无法覆盖水下/地下、受太阳活动等自然因素影响,在印巴、中印边境已频发GPS干扰事件,严重削弱精确制导武器效能。接着阐释量子传感的军事价值。量子传感是量子技术中成熟度最高、实用性最强的方向,核心利用原子、超导、固态缺陷等量子体系实现超高精度测量,分为原子传感器、超导传感器、固态缺陷传感器三类。其应用于PNT的四大方向为:量子原子钟(芯片级CSAC、光原子钟)、量子惯性导航(冷原子干涉仪)、量子磁导航(NV中心磁力计)、量子重力导航(原子干涉重力仪)。量子PNT最大优势是不依赖外部信号,抗干扰、抗欺骗,可在无卫星信号环境下长期稳定工作,完美弥补经典系统缺陷。随后对比全球主要国家布局:美国通过国家量子计划,由国防部、DARPA推动量子PNT实战化,已完成机载、星载测试;中国聚焦量子雷达与高精度量子探测;英、法、澳在量子重力、惯性导航领域取得突破,AUKUS联盟将量子PNT列为核心合作方向。
印度方面,已建成区域卫星导航系统NavIC,运营6座eLoran基站,DRDO、BEL等研发多款惯性导航系统,依托2023年启动的国家量子任务,在IIT孟买、DRDO等机构推进量子磁力计、重力仪、原子钟研发,初创企业也参与其中。但印度PNT体系隐患突出:NavIC多数卫星失效或濒临退役,替代卫星发射失利;替代导航系统建设滞后;缺乏军方主导的PNT战略;量子传感面临出口管制、供应链受限、资金拨付慢、设备采购繁琐等瓶颈。
该论文提出政策建议:国防部牵头开展全军PNT能力评估,制定5-10年长期战略;设立专门机构统筹经典与量子PNT研发;突破出口管制与供应链约束,加强国际合作;简化科研资金与设备采购流程;拓展太空、极地等新型测试平台;融合AI提升量子传感器性能。该论文还强调,量子PNT是印度提升战场优势、保障边境安全的关键技术,军方加速落地可推动量子技术民用转化,塑造印度量子生态的未来。
GNSS拒止环境下基于信标的自主无人潜航器隐蔽导航解决方案(A Beacon Based Solution for Autonomous UUVs GNSS-Denied Stealthy Navigation)
2026年1月22日,该论文发布于arXiv。该论文由法国学者撰写,针对自主水下无人潜航器(UUV)在无全球导航卫星系统(GNSS)环境下的隐蔽导航需求,提出了一种基于信标部署的解决方案,设计了信标星座部署算法与分层任务网络(HTN)规划架构,实现了UUV舰队从大陆架到海岸目标的高精度隐蔽导航,并基于QGIS开发了配套插件完成算法落地与仿真验证,为海事军民隐蔽作业提供了新的技术路径。
论文指出,GNSS信号因高频电磁波在水下快速衰减无法使用,而UUV浮出水面定位又易暴露,在海岸保护区、禁入危险区等场景的军民作业中,无GNSS隐蔽导航成为刚需;现有水下声学定位方法如长基线(LBL)系统部署校准复杂、单信标系统定位解不唯一,且水下导航受洋流、通信受限等环境因素影响,现有研究也远落后于无人机和地面机器人的无GNSS定位技术,亟需针对性解决方案。论文核心提出由空中或水面无人机部署声学信标星座,构建人工地标网络为UUV舰队导航的整体框架。信标可根据特性沉至海床、悬浮水中或漂浮水面,发射最大传输距离2000米的低频声学信号,UUV搭载声学调制解调器、惯性导航系统(INS)等设备接收信号完成定位,且该框架采用分布式规划,各UUV独立执行导航与监测任务。
为实现信标的最优部署,论文设计了基于约束Lloyd算法的部署方案,以最大化UUV传感器信息收集为目标,通过最小化各信标信号覆盖水域体积的平均绝对偏差,将任务水域等体积划分为N个区域,利用Voronoi图迭代确定信标质心位置,保证信号覆盖的均匀性,该算法可在QGIS中结合测深数据完成水域体积计算与位置规划。在导航规划层面,论文采用HTN分层规划范式,将UUV导航任务分解为导航、感知信标、广播消息等原始动作,由HTN规划器生成从一个信标到下一个信标的自适应导航路径。同时设计闭环执行框架,通过监测模块持续收集UUV导航数据、评估舰队状态,若出现信标信号未检测到、信标因洋流位移等情况,立即触发重规划,适配水下动态环境的不确定性,且论文尝试采用HDDL2.1语法融入时间约束,提升规划的精准性。
论文将整套算法与框架实现为QGIS插件,包括信标部署插件和TraceQGIS导航仿真插件,可可视化信标、UUV位置及通信、运动轨迹,并通过撒丁岛卡波泰斯塔海岸的仿真案例验证了方案有效性:单台UUV在初始位置不确定的情况下,通过感知信标信号完成精确定位,向舰队广播位置信息后继续向目标信标航行,其他UUV接收信息后向该位置靠拢,完成协同导航。论文最后指出当前研究未考虑UUV舰队协同,且未充分纳入水下通信限制的影响,未来将结合三边测量法,利用UUV间通信实时计算距离、定位信标,同时优化舰队协同导航策略,完善带时间约束的HTN规划器开发,进一步提升方案在复杂水下环境中的鲁棒性。