infiniDome与Wonder Robotics联合发布IroNav抗干扰自主导航系统。
SatNews网站2026年1月21日报道,infiniDome与Wonder Robotics宣布战略合作,推出IroNav全栈式弹性自主导航系统,旨在解决现代冲突区域全球导航卫星系统(GNSS)信号脆弱性问题,目前正在印度进行客户验证试验。IroNav系统采用单一集成架构,融合了电子导航防护与视觉导航两大技术域。该系统整合了infiniDome的抗干扰天线技术与Wonder Robotics的视觉自主能力,可在GNSS信号可用时最大化利用卫星信号,并在信号丢失或遭受欺骗时无缝切换至完全拒止环境防护模式,无需外部基础设施或持续人工监督即可保持位置、授时及控制回路稳定性。该方案的核心组件WonderLand是一套视觉精准着陆技术,能够在完全失去GNSS信号的条件下,于移动平台、海上环境及未准备地形实现自主着陆。这一设计将弹性导航能力延伸至历史上最易出错的着陆阶段,使操作人员能够在强电子干扰环境下执行时敏性打击任务或持续情报监视侦察(ISR)任务。Wonder Robotics联合创始人兼首席商务官Or Epstein指出,IroNav标志着行业设计理念的战略转变——GNSS干扰不再被视为偶发事件,而是贯穿设计全程的持久性约束条件。该系统目前处于高级开发阶段,正通过印度客户进行多样化对抗环境验证,面向将导航弹性视为战略能力的专业用户。
伽利略卫星导航系统的开放服务导航电文认证已从实验信号转为正式服务。
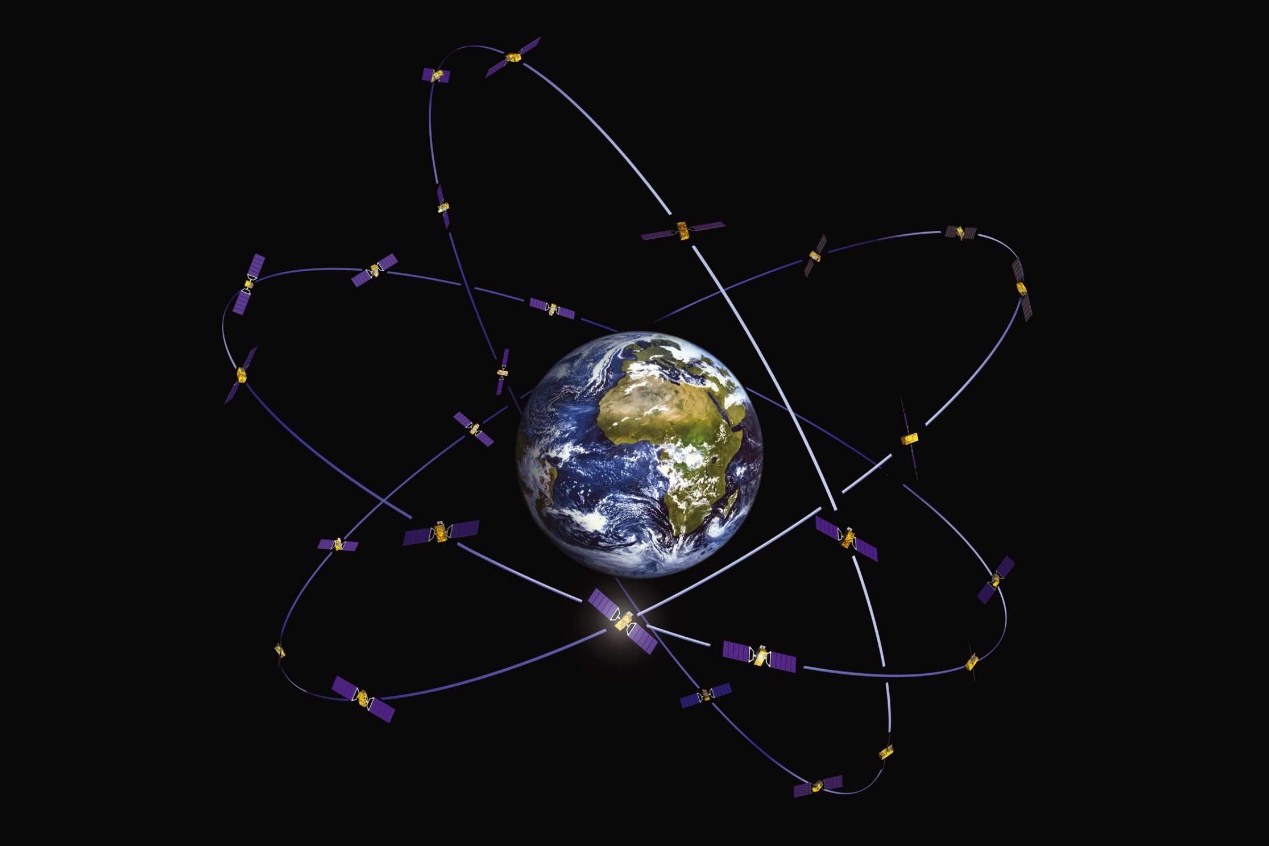
Inside GNSS网站2026年1月21日报道,经过多年研发与大规模测试,伽利略卫星导航系统的开放服务导航电文认证(OSNMA)已从实验信号转为正式服务,使伽利略成为全球首个提供加密认证导航数据的民用全球导航卫星系统(GNSS)。OSNMA自2025年7月宣布初始服务以来,已在伽利略E1信号上广播运行认证信息,依托实时公钥基础设施和受管理的加密密钥链;2026年初,工作重心从技术部署转向运营应用,欧洲GNSS服务中心(GSC)更新了服务文档、密钥分发流程及接收机实施指南,助力厂商和系统运营商将其纳入伽利略服务基准,虽加密接口已确定,相关部门仍在协调监管、认证与运营框架,以支持其在安全关键和基础设施级应用中使用。OSNMA通过在导航电文中嵌入数字签名,让接收机可验证广播星历和时钟数据是否真正来自伽利略卫星且未被篡改,虽无法防干扰,但能检测导航电文欺骗,解决民用GNSS长期存在的漏洞。过去一年,欧盟通过保障欧洲地球静止导航重叠服务(EGNOS)持续运行至21世纪20年代末,强化了定位、导航与授时(PNT)基础,EGNOS与OSNMA形成互补,前者提供完整性、精度提升及实时安全警报,后者验证真实性,为航空、航海、铁路及关键授时用户增强对卫星定位和时间数据的信心。欧盟委员会和欧盟空间计划局(EUSPA)官员称OSNMA是欧洲太空自主的支柱,EUSPA执行董事Rodrigo da Costa也表示其增强了民用GNSS的韧性与创新;欧洲卫星(含哥白尼哨兵系列)依赖伽利略的授时和轨道数据获取关键地球观测产品,本月哨兵-3B卫星GNSS重新配置也体现航天器运行与信号完整性的关联,而这正是OSNMA旨在缓解的风险。
AIVON网站发布文章《无人机导航与定位的关键技术》。
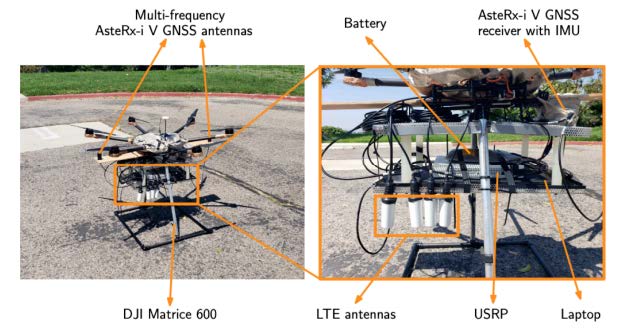
2026年1月19日,AIVON网站发布文章《无人机导航与定位的关键技术》指出,当前无人机在农业、事故调查、军事等领域需求激增,其导航定位可靠性对运营安全至关重要,小巧、轻便且低成本的相关技术已成研究重点。文章介绍,GPS及北斗、格洛纳斯、伽利略等全球导航卫星系统定位原理基本一致,需至少4颗卫星求解无人机位置与时钟偏差,但单独使用易受大气等因素影响,误差达数米至数十米;差分技术可通过参考站或专业服务商提供的修正信息提升精度,GNSS虽能支持RTK、PPP等厘米级定位模式,却存在城市峡谷信号衰减、易受干扰欺骗等局限。为此,研究人员采用传感器融合技术,常用三种导航方案:RTK与MEMS松散耦合在部分场景达厘米级精度,但基线长度受限;PPP与MEMS松散耦合在实验中用低成本设备达分米级精度,需解决单频接收机周跳检测问题;雷达高度计辅助GNSS定位可结合相关子系统提升三维定位精度与连续性,以满足严格着陆需求。文章还举例,可用双天线GNSS航向方案替代无人地面车辆易受干扰且需频繁校准的磁罗盘,该方案也适用于无人机,同时提及无人地面车辆系统包含的厘米级RTK定位服务、激光雷达避障等要素。