柯林斯航空航天公司推出了一款小型可安装卡片式的下一代抗干扰技术产品——APNT系统。
下一代防务网站2025年12月23日报道,柯林斯航空航天公司(Collins Aerospace)推出了一款小型可安装卡片式的下一代抗干扰技术产品——APNT(确保定位、导航与授时)系统,该系统通过融合军用代码GPS与一系列传感器,能在GPS信号不可靠或被阻断的对抗环境中为地面系统维持可靠导航。柯林斯航空航天公司表示,这款APNT卡片可在对抗环境中提供高精度导航,是可扩展且具成本效益的解决方案,目前已可集成到多种平台,其更小的外形尺寸还能加快任务定制并提升态势感知能力。该APNT卡片已参与美国陆军的“全域持续实验”(All-Domain Persistent Experiment),用于在复杂电磁环境中测试新技术;它是柯林斯迄今最小的地面解决方案,符合美国陆军紧凑型模块化开放系统标准,可适配标准化CMFF(车载外形尺寸)插槽,搭配外置天线后能在恶劣作战环境中保持稳定性能,还可安装在包括地面机器人和自主平台在内的多种军用车辆上。

NextNav公司将为日本部署其先进的5G定位、导航与授时解决方案。
MarketMinute网站2025年12月16日报道,NextNav公司宣布与日本东京的MetCom公司扩大战略与技术合作,这是NextNav首次在国际上部署其先进的5G定位、导航与授时(PNT)解决方案,旨在革新日本主要都市圈的关键基础设施。根据协议,MetCom获得NextNav专有5G波形和接收器技术授权,计划搭建地面5G网络,提供精确授时服务,作为GPS等全球导航卫星系统(GNSS)的补充与备份,该网络需待MetCom获得日本监管机构无线电许可后方可部署。此次合作对双方意义重大,NextNav借此进军国际5G PNT市场,有望开拓新收入来源并推动技术商业化,MetCom则可成为日本下一代PNT服务关键提供商;同时可能对仅依赖传统GNSS技术的企业构成挑战,推动PNT市场多元化。这一合作也标志着全球PNT格局的重要转变,响应了各国对卫星系统替代方案的需求,或为其他国家提供参考,未来MetCom获取许可后的分阶段部署及NextNav的国际扩张值得关注,同时也面临与现有基础设施整合等挑战。
韩国国土交通部通过成功验证城市空中交通独立航空器在真实城市环境中的综合运营能力和抗干扰技术。
UNMANNED AIRSPACE网站2025年12月15日报道,大韩民国国土交通部宣布,通过K-UAM示范项目成功验证了城市空中交通独立航空器的综合运营能力。该示范项目于2025年10月在阿拉水路和清罗-桂阳段启动,重点验证城市空中交通在真实运营环境中的运营、交通管理和垂直起降场运营等关键要素。参与验证的两个商业联盟包括K-UAM第一团队(由KT、大韩航空、仁川国际机场公社、现代汽车公司和现代建设组成)和梦想团队(由韩国机场公社和韩华系统组成),在空军协作下,使用城市空中交通独立航空器测试了多种运营场景。国土交通部确认,两个联盟均成功执行了运营程序、交通管理系统、垂直起降场运营系统和异常情况响应程序等关键功能,机构间信息共享和系统连通性也得到有效验证。技术验证层面,K-UAM第一团队成员KT在真实城市环境的挑战条件下,成功测试了UAM交通管理系统和5G航空网络的稳定性。梦想团队成员韩国机场公社将其自主研发的UAM交通管理系统与波音公司基于人工智能的航空信息系统实现链接,实时共享飞行信息。由远东大学、韩西大学和庆云大学教授及技术委员会成员组成的验证评估小组宣布“综合操作性的计划技术目标已达成”。11月24日,在利益相关方飞行演示活动期间,使用可选驾驶个人飞行器进行了城市示范飞行,验证了多卫星、多频率抗干扰技术在城市无线电环境中的可靠性。飞行器的位置精度在整个飞行过程中保持在正常范围内,地面通信质量稳定,卫星导航校正信号持续接收,确保了自主导航所需的可靠性。

学术动态
西班牙、沙特阿拉伯研究团队在arXiv发表论文《低地球轨道星座作为去中心化全球导航卫星系统网络:优化太空中的定位、导航与授时校正》。
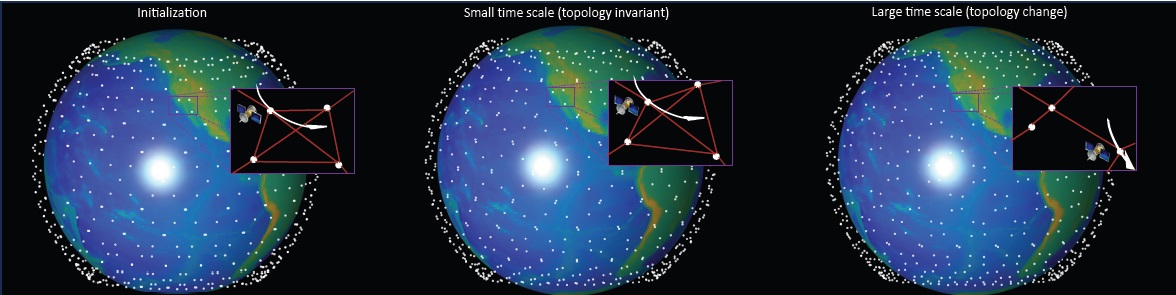
2025年12月24日,来自西班牙巴塞罗那自治大学与沙特阿卜杜拉国王科技大学的研究团队在arXiv发表论文《低地球轨道星座作为去中心化全球导航卫星系统网络:优化太空中的定位、导航与授时校正》,提出面向大规模低地球轨道(LEO)星座的去中心化全球导航卫星系统(GNSS)网络架构,实现星载GNSS协同处理和高精度定轨定时。当前LEO卫星搭载的GNSS接收机多为独立运行,定位精度仅达米级,而高精度应用需依赖地面分析中心生成的精密产品,存在延迟大、实时性差的瓶颈。研究创新性地将LEO星座视为空间分布式GNSS观测网络,各卫星通过星间链路与邻近节点交换紧凑信息,协同估计星座级状态。方法层面,研究建立了涵盖卫星位置、速度、时钟偏差、硬件偏差、电离层延迟和载波相位模糊度的网络级估计模型。针对设计矩阵秩亏问题,采用S系统理论进行可估计性分析,确保所有节点收敛至一致参数空间。为应对大规模星座的动态拓扑和通信受限,研究开发了动量加速梯度跟踪算法,将星座建模为时变通信图,通过多轮共识操作增强信息扩散,显著提升收敛速度并降低通信开销。仿真验证基于包含500颗卫星的Walker-Delta星座,每颗卫星仅与4个最近邻居通信。实验对比显示:独立处理的定轨误差为2.95米、时间同步误差为7.95纳秒;网络协同浮点解将精度分别提升至0.12米和0.21纳秒;引入整数模糊度固定后,定轨精度达厘米级(0.06米),时间同步精度达0.11纳秒。消融实验证实,动量加速与多轮共识的协同缺一不可,两者结合使算法线性收敛至中心化基准解。研究意义在于构建了自组织空间GNSS网络,实现无需地面支持的高精度自主定轨定时,为未来自主空间系统提供了理论与算法基础。局限性在于仅模拟GPS观测,未涉及多GNSS融合及真实星间链路的通信噪声影响,后续可扩展至多星座融合和在轨验证。
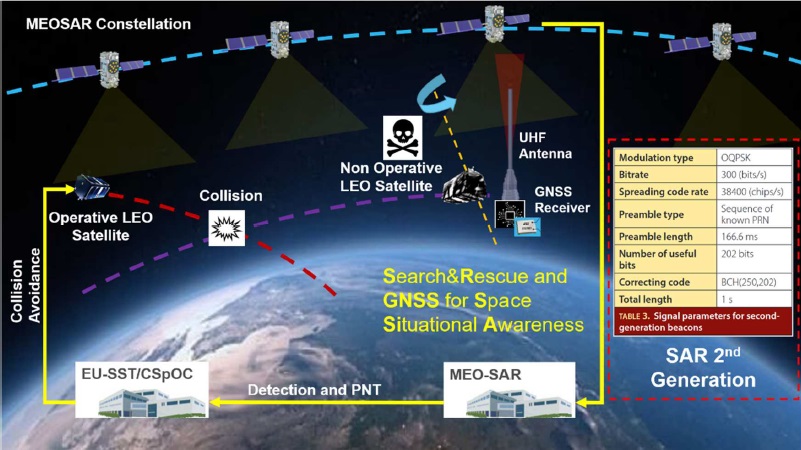
GNSS接收器的硬件在环测试以提升空间态势感知:SARGASSIA项目(Hardware-in-the-Loop testing of a GNSS Receiver for Improved Space Situational Awareness:the SARGASSIA project)
2025年4月,该论文发表于“2025年IEEE/ION位置、位置与导航研讨会(PLANS)”。论文围绕SARGASSIA项目展开,聚焦低地球轨道(LEO)空间目标态势感知(SSA)需求,研究基于全球导航卫星系统(GNSS)接收机的硬件在环(HIL)测试,旨在通过优化GNSS模块提升失控航天器定位效率,为空间碰撞规避与碎片监测提供支持。
论文指出,LEO轨道目标数量激增易引发碰撞风险,可能触发“凯斯勒效应”导致空间碎片泛滥,欧盟“空间监视与跟踪”(EU SST)计划虽以地面雷达等被动跟踪为主,但存在覆盖与成本局限。为此,SARGASSIA项目提出创新方案:在LEO卫星上集成低功耗GNSS接收机与主动信标,航天器故障时接收机自主激活,通过第二代中地球轨道搜救(MEOSAR)系统中继定位(PNT)信息至空间交通管理(STM)组件,核心目标是缩短首次定位时间(TTFF)以降低功耗、延长系统寿命,并提升失控航天器自旋状态下的定位鲁棒性。
研究设计了三种GNSS接收机配置:基准的GalCED(单频伽利略E1接收机,依赖标准星历数据)、RedCED(集成伽利略I/NAV改进的简化星历RedCED,加速数据解码)、Mixed(RedCED基础上增加GPS L1信号,实现双星座观测)。测试依托欧盟联合研究中心(JRC)的空间服务体积测试台(JRC-ISSVTB)搭建HIL环境,模拟失控LEO卫星(2.5度/秒三轴自旋)的2天轨道周期,对248组轨道弧段进行冷启动测试,记录TTFF与定位精度数据。
实验结果显示,配置优化显著提升性能:RedCED较GalCED在TTFF中位数上缩短约100秒,95百分位缩短57秒;Mixed配置表现最优,TTFF中位数仅108秒,95百分位407秒(不足7分钟),较GalCED提升超2分钟。定位精度方面,虽RedCED与Mixed因简化星历导致精度略有下降(中位数分别为21.50米、23.57米,GalCED为14.82米),但50百分位精度均控制在30米内,满足SSA基本需求。此外,Mixed配置在200秒激活时限、20米精度要求下,约37%测试可实现有效定位,为后续应用提供参考。
论文认为,SARGASSIA项目初步验证了GNSS接收机在SSA中的可行性,未来将进一步优化信号处理以缩短TTFF、探索双天线设计扩大卫星观测范围,并推进与主动信标的系统集成,同时针对不同自旋速率、信号强度开展更全面测试,最终为LEO空间基础设施可持续性提供高效的态势感知解决方案。